Functions | |
| std::vector< double > | ROOTEquationSolver (const double &m1, const double &b1, const double &m2, const double &b2, const double &m3, const double &b3, bool debugMode) |
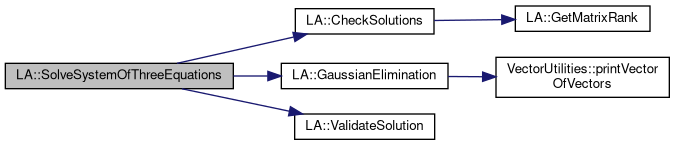
| void | GaussianElimination (std::vector< std::vector< double >> &mat, bool debugMode=false) |
| int | GetMatrixRank (const std::vector< std::vector< double >> &mat) |
| int | CheckSolutions (const std::vector< std::vector< double >> &mat, std::vector< double > &solution) |
| bool | ValidateSolution (const std::vector< std::vector< double >> &origMat, const std::vector< double > &solution, bool debugMode) |
| bool | IsSlopeUndefined (double slope) |
| std::vector< double > | SolveSystemOfThreeEquations (const double &m1, const double &b1, const double &m2, const double &b2, const double &m3, const double &b3, bool debugMode) |
Function Documentation
◆ CheckSolutions()
| int LA::CheckSolutions | ( | const std::vector< std::vector< double >> & | mat, |
| std::vector< double > & | solution | ||
| ) |
Function to check the type of solution
Create the augmented matrix by copying the original matrix and adding a column of constants
Remove the solution column to get the coefficient matrix
No solution
Infinite solutions
Perform back substitution to find the solution
No solution
Unique solution


◆ GaussianElimination()
| void LA::GaussianElimination | ( | std::vector< std::vector< double >> & | mat, |
| bool | debugMode = false |
||
| ) |
Function to perform Gaussian elimination. converts the matrix to an upper triangular form.
Find pivot for column i
If the pivot is zero, skip this column
Scale pivot row
Eliminate below


◆ GetMatrixRank()
| int LA::GetMatrixRank | ( | const std::vector< std::vector< double >> & | mat | ) |
Function to determine the rank of the matrix

◆ IsSlopeUndefined()
| bool LA::IsSlopeUndefined | ( | double | slope | ) |
A helper function to check if a slope is undefined.
◆ ROOTEquationSolver()
| std::vector<double> LA::ROOTEquationSolver | ( | const double & | m1, |
| const double & | b1, | ||
| const double & | m2, | ||
| const double & | b2, | ||
| const double & | m3, | ||
| const double & | b3, | ||
| bool | debugMode | ||
| ) |
uses TDecompSVD, which performs a singular value decomposition to solve the linear system
Solution vector
Solve the system
Handle the error by returning an empty vector.
If is_good_solution is true, convert solution into an std::vector and return it.
- Parameters
-
m2 XZ projection: z = m1*x + b1 m3 YZ projection: z = m2*y + b2 debugMode XY projection: y = m3*x + b3


◆ SolveSystemOfThreeEquations()
| std::vector<double> LA::SolveSystemOfThreeEquations | ( | const double & | m1, |
| const double & | b1, | ||
| const double & | m2, | ||
| const double & | b2, | ||
| const double & | m3, | ||
| const double & | b3, | ||
| bool | debugMode | ||
| ) |
To solve Augmented matrix representation of the system of equations Form: ax + by + cz = d
- Parameters
-
m2 XZ projection: z = m1*x + b1 m3 YZ projection: z = m2*y + b2 debugMode XY projection: y = m3*x + b3

◆ ValidateSolution()
| bool LA::ValidateSolution | ( | const std::vector< std::vector< double >> & | origMat, |
| const std::vector< double > & | solution, | ||
| bool | debugMode | ||
| ) |
The solution does not satisfy the equation
The solution satisfies all equations
